Cognitive rObot Localization Database (COLD)
Andrzej Pronobis*^, Kaiyu Zheng**, Kousuke Ariga^, Rajesh P. N. Rao^
* KTH Royal Institute of Technology, Stockholm, Sweden.
** Brown University, Providence, RI, USA.
^ University of Washington, Seattle, WA, USA.
Overview
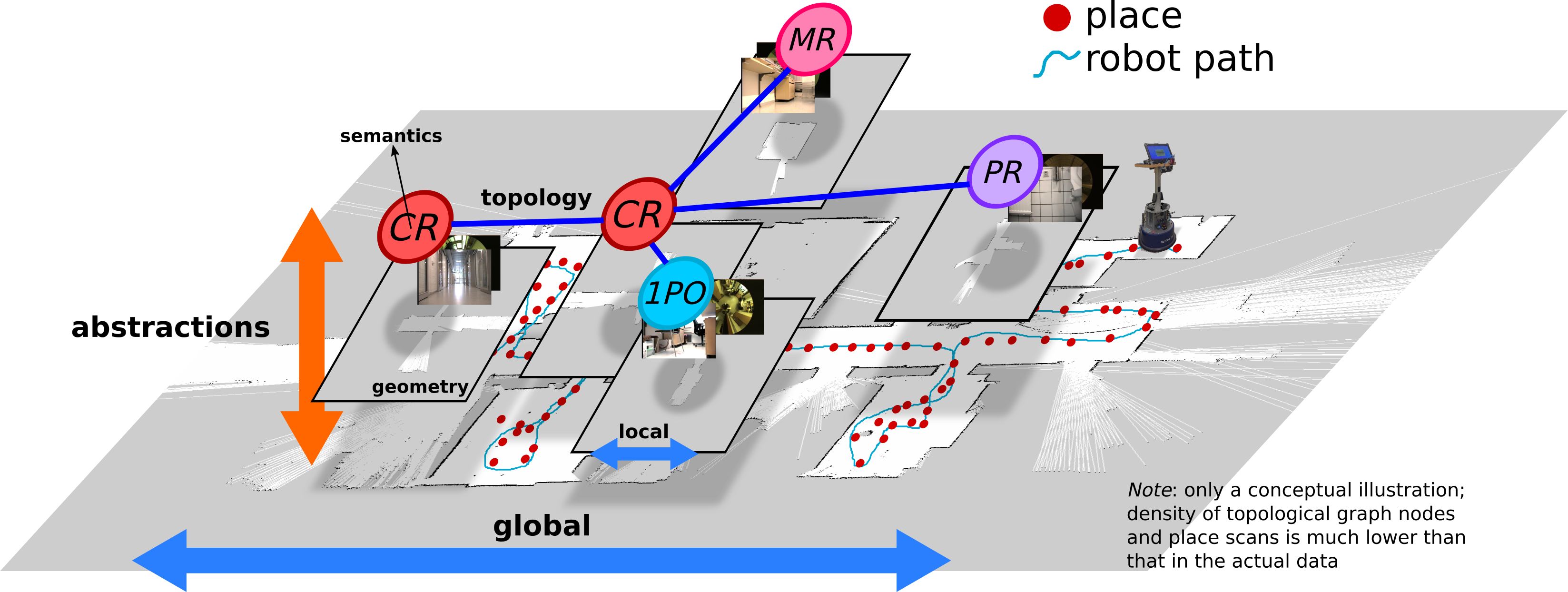
Mobile robots are now capable to navigate from place to place in indoor environments. However, in order to perform service tasks such as tour guiding, object search, and safety monitoring, it is essential for mobile robots to maintain a representation of spatial knowledge and being able to reason upon it. Such spatial knowledge spans vertically across different levels of abstraction, from low-level sensory observations to high-level human semantics, and horizontally across spatial scales, from local places to large-scale environment topologies. Learning a representation for spatial knowledge therefore requires a dataset that captures the hierarchical nature of spatial knowledge at large-scale environments, which is exactly what this dataset aims to provide.
We present the Cognitive rObot Localization Database (COLD), a large database of localization, sensory information and local environment representations (place scans), as well as topological maps, completely annotated with semantic place categories. There are 100 sequences in total, collected by a mobile robot in three buildings at three different locations: Stockholm, SE (40 seqs), Freiburg, DE (26 seqs), and Saarbrucken, DE (34 seqs). It contains multiple modality of information, including RGB images, videos, and laser scans. RGB images and videos are collected from an on-board regular camera as well as an on-board omnidirectional camera. In addition, to facilitate more robust behaviors in different environment conditions, the dataset is organized by weather types (e.g. cloudy, sunny, night). We hope, through our free-release of this database, to support research of various robotics problems including but not limited to:
- Place classification [1]
- Mobile robot localization and mapping (e.g. navigation, SLAM) [2]
- Probabilistic graphical models and structured prediction [3]
- Semantic mapping [3][4]
- General machine learning problems such as transfer learning [5]
- Perception and computer vision
Relation with the previous COLD database
This database extends from the previous COLD database [6], released back in 2009. The presented database here is more comprehensive in terms of data modalities and more user-friendly. Specifically, the enhancement is reflected in the following aspects:
- We added one more building, in Stockholm, Sweden, which contains 40 sequences on 4 floors.
- We collected local laser scan representation - place scans - for all sequences in all buildings.
- For every sequence, instead of only providing raw odometry and laser range data as in [6], we also provide streams of localized, annotated poses, SLAM maps, as well as rosbag files that contain the odometry and laser range data for smooth integration into your ROS codebase.
- We also provide a dataset of topological graphs to support research in broarder domains.
Datasets
We divide this database into multiple datasets as listed below. Click their links to learn about their specifics and download the datasets.
- COLD-PlaceScans - a dataset of place scans.
- COLD-TopoMaps - a dataset of topological maps.
- COLD-Meta - a dataset of metadata, that is, robot maneuver paths, streams of localizations and annotations, SLAM maps.
- COLD-Images - a dataset of image frames from multiple on-board cameras.
The COLD database is still in preparation and download will be made available soon. Please check back in a few days.
Examples
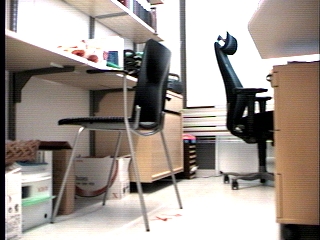
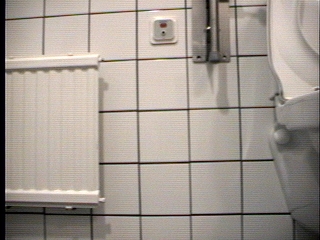
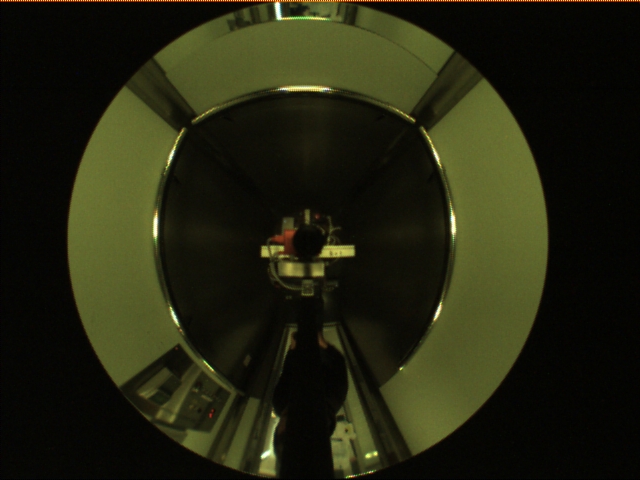
Examples of images from regular camera and omnidirectional camera:
 |
 |
 |
 |
|---|---|---|---|
 |
 |
 |
 |
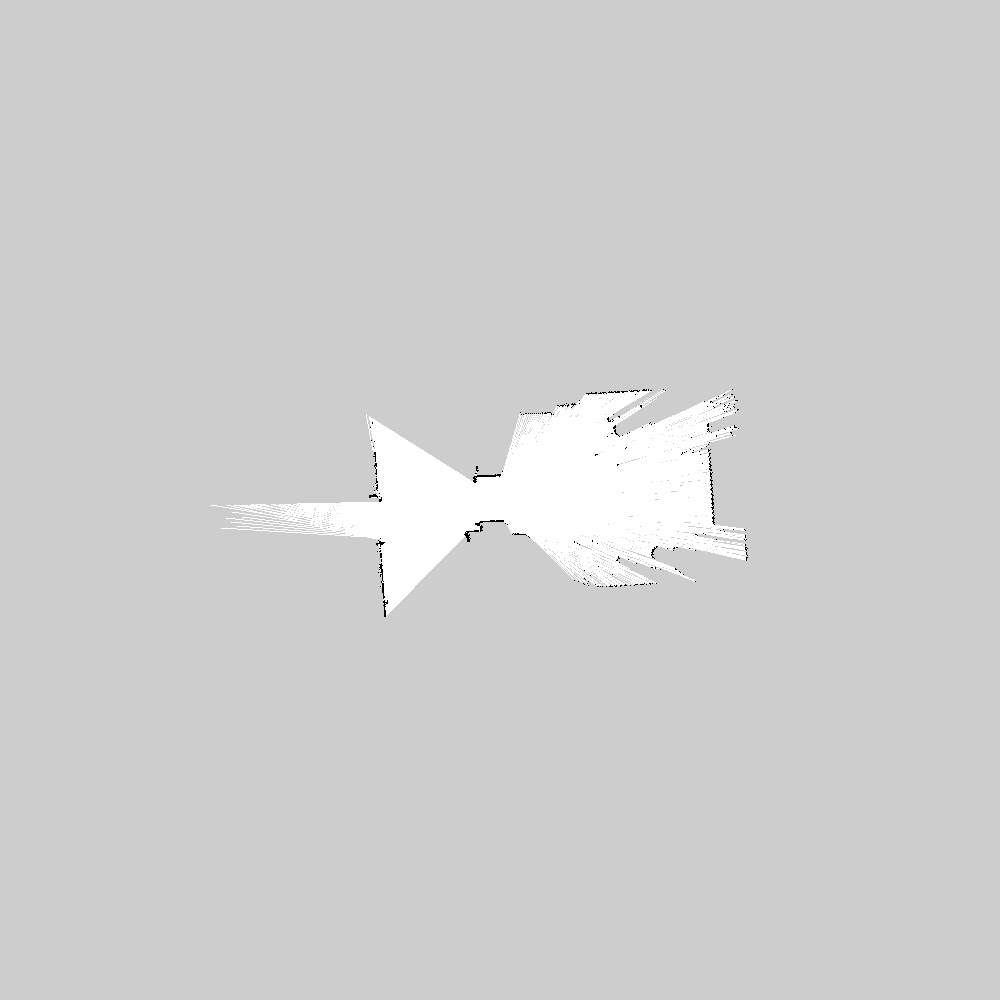
Examples of place scans (local geometry representation):
 |
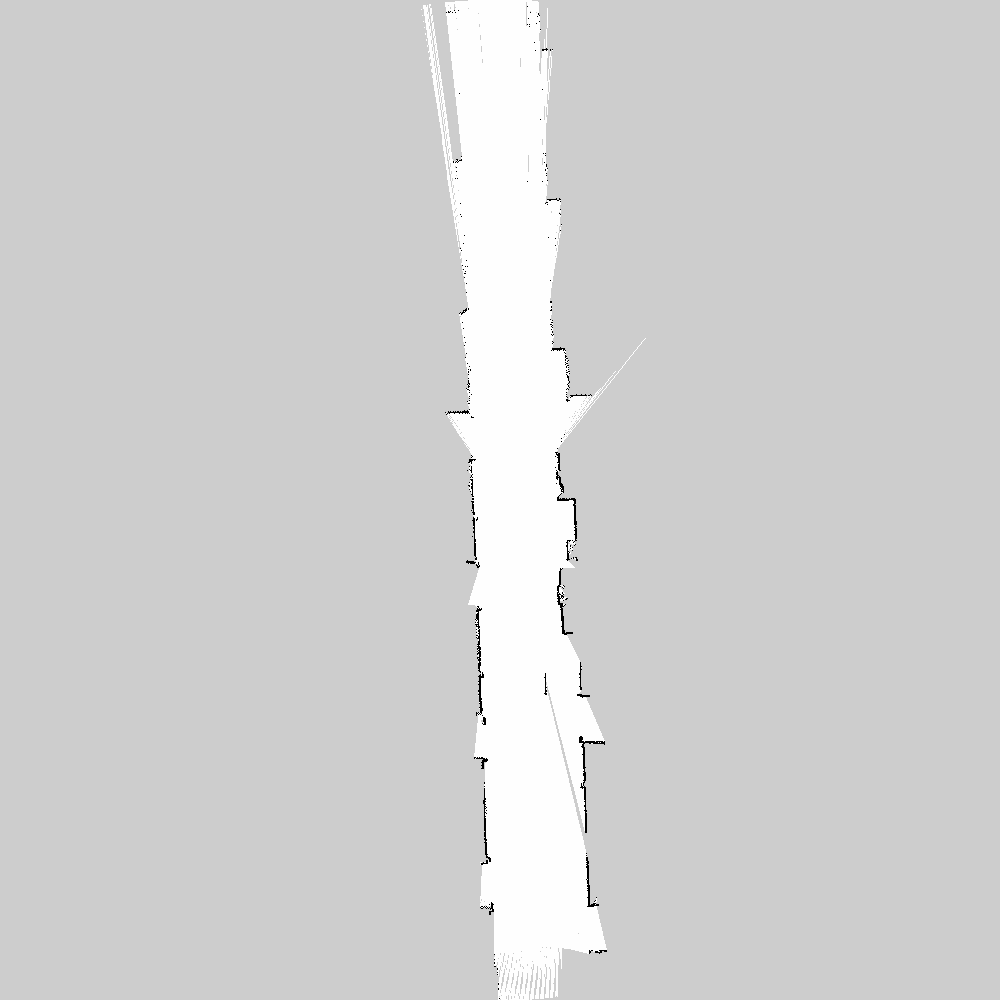 |
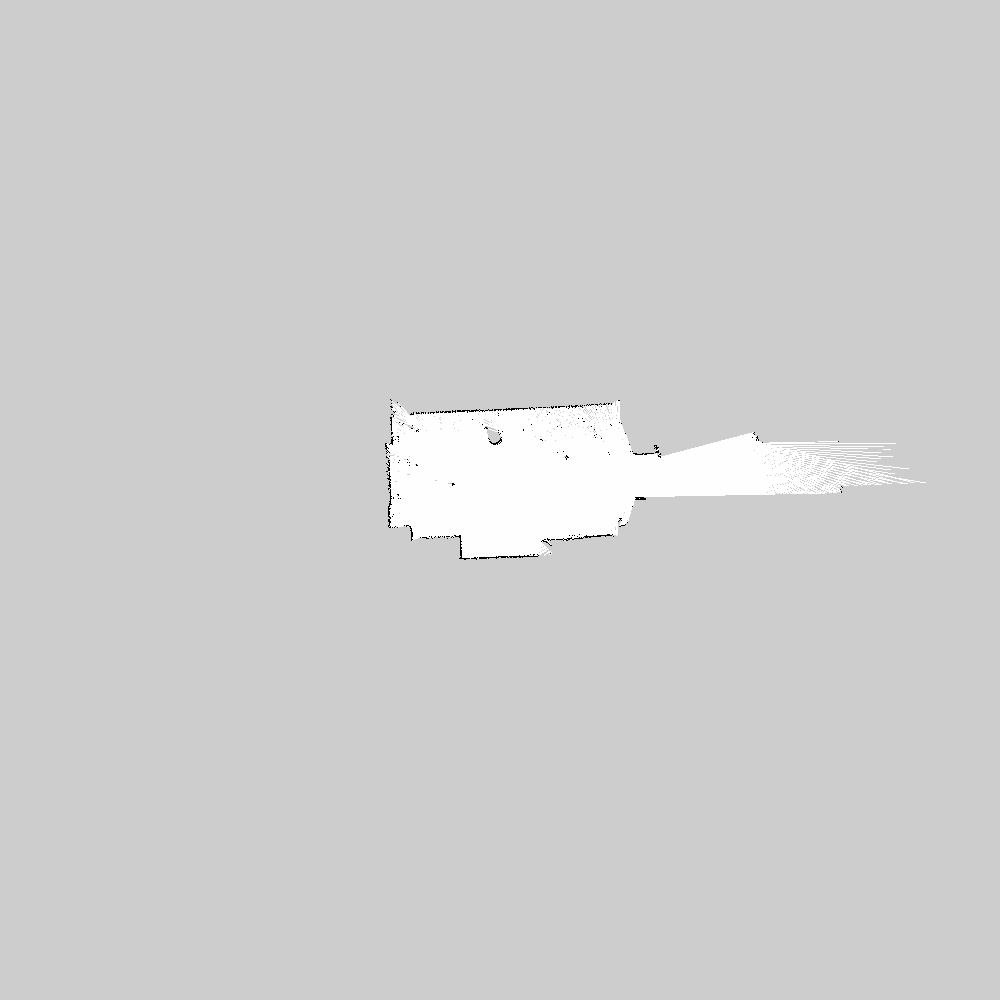 |
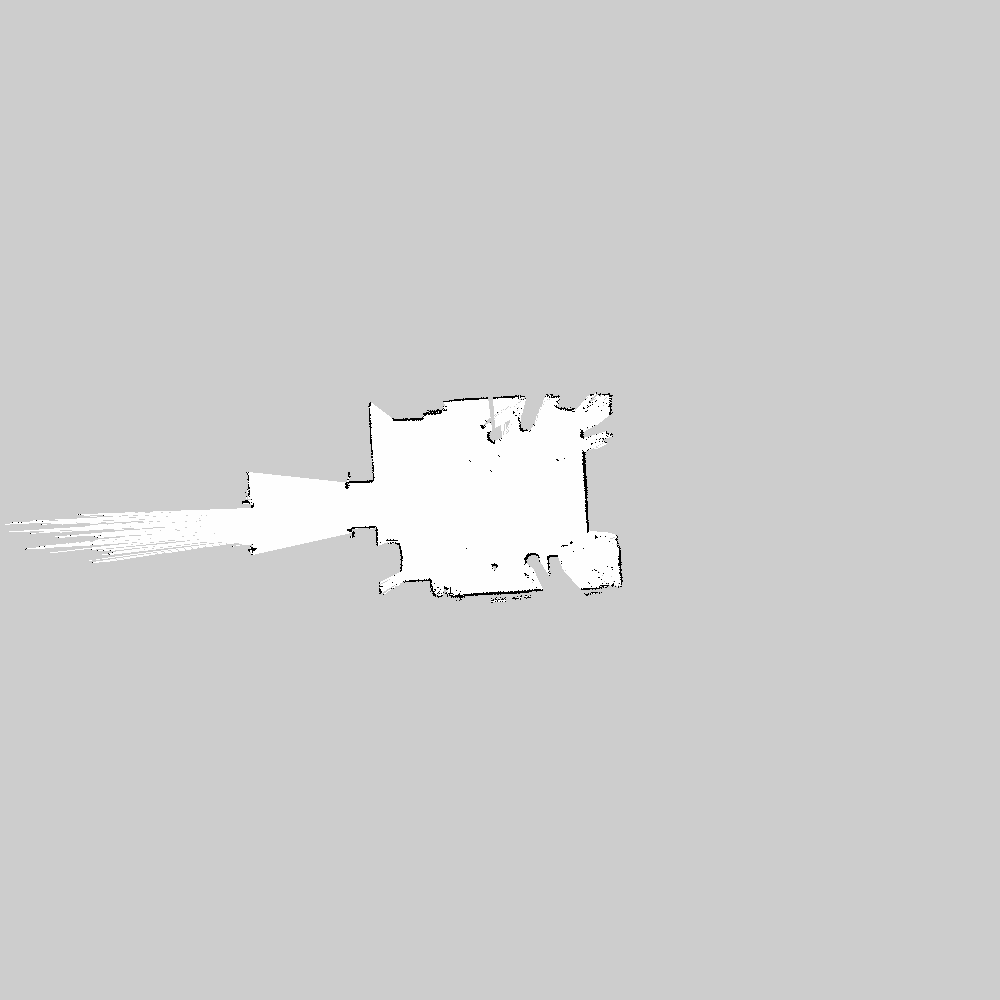 |
|---|---|---|---|
| Doorway | Corridor | One-person office | Two-person office |
Examples of topological maps and robot maneuver paths:
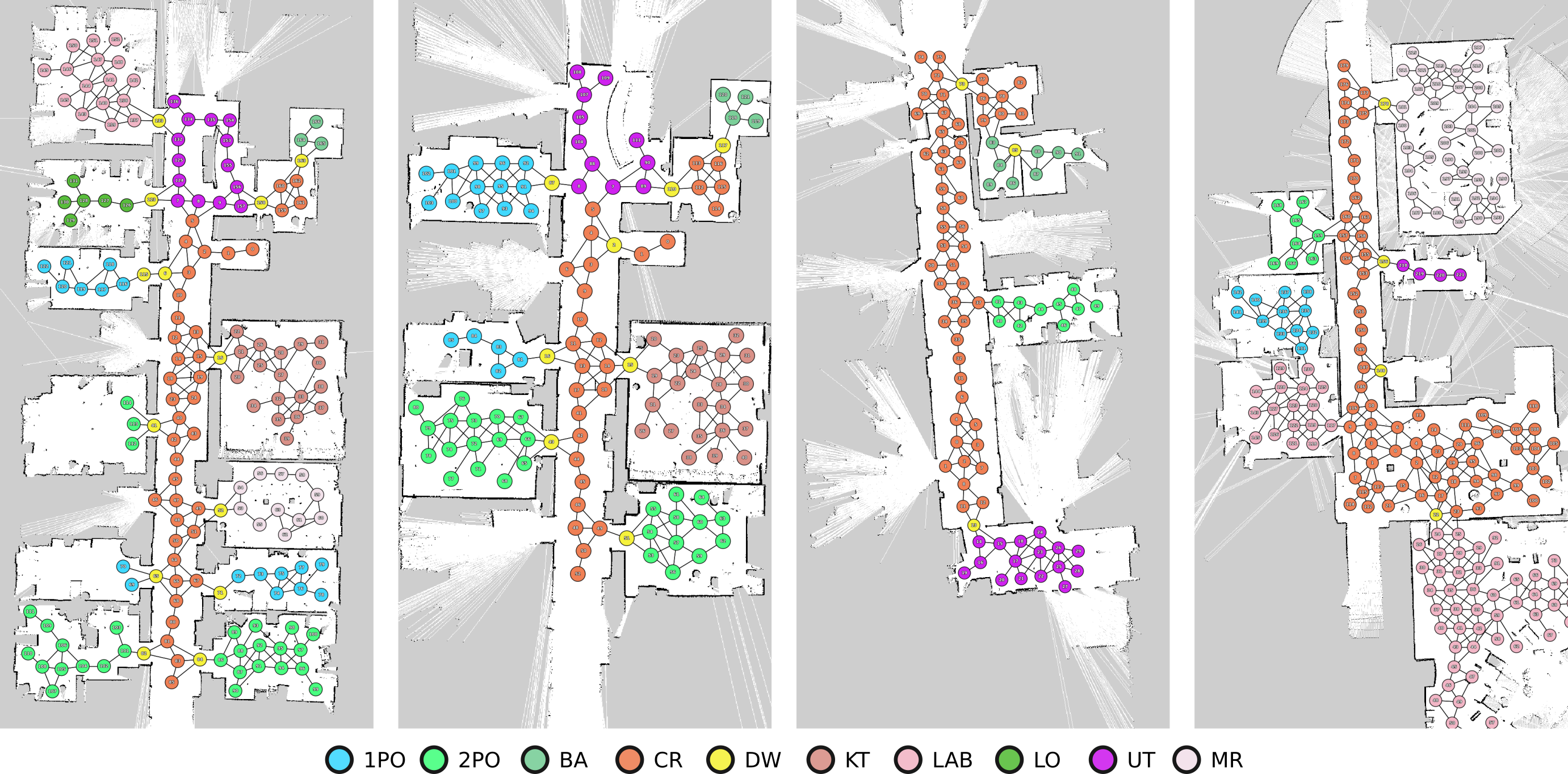 |
|---|
 |
Citation
The paper for COLD database will be available soon.
License
References
[1] A. Pronobis and R. P. N. Rao, "Learning deep generative spatial models for mobile robots," in Proceedings of the International Conference on Intelligent Robots and Systems (IROS), 2017.
[2] K. Zheng, "ROS Navigation Tuning Guide," arXiv preprint arXiv:1706.09068, 2016.
[3] K. Zheng, A. Pronobis and R. P. N. Rao, "Learning {G}raph-{S}tructured {S}um-{P}roduct {N}etworks for Probabilistic Semantic Maps,", Proceedings of the 32nd AAAI Conference on Artificial Intelligence (AAAI), 2018.
[4] K. Zheng and A. Pronobis, "From Pixels to Buildings: End-to-end Probabilistic Deep Networks for Large-scale Semantic Mapping", arXiv preprint arXiv:1812.11866, 2019.
[5] K. Ariga "Semi-Supervised Spatial Knowledge Transfer with Deep Generative Models", Senior Thesis, 2017.
[6] A. Pronobis and B. Caputo, "COLD: The CoSy localization database", 2009.
Contact Information for Corresponding Author
Andrzej Pronobis (see email on website)